

Hintergrund
Bei der topografischen Kartierung von Städten gibt es in bestimmten Gebieten Probleme mit Fluggenehmigungen, so dass die mobile Vermessung am Boden aufgrund ihrer Flexibilität und der geringeren Beschränkungen von Vorteil ist.
Challenge Identification
Wir verfügen über ALS-Daten für die Schnellstraße und ihre Umgebung, aber es fehlen umfassende Details zu Straßen, Brücken und Tunneln. Photogrammetrie und luftgestütztes LiDAR für die topografische Kartierung von Städten werden häufig für die städtische Rekonstruktion verwendet, liefern aber aufgrund von Verdeckungen keine vollständigen 3D-Informationen über die Stadt.
Workflow
Wir setzen Cygnus SLAM auf mehreren Plattformen für die 3D-Datenerfassung in Städten ein und ergänzen damit die ALS-Daten. Anpassbar für Handgeräte, Rucksäcke, Fahrzeuge und aus der Luft. Cygnus SLAM-Laserscanner verbessern die Kartierung von städtischen Strukturen wie Viadukten, Brücken, Straßen und Tunneln.
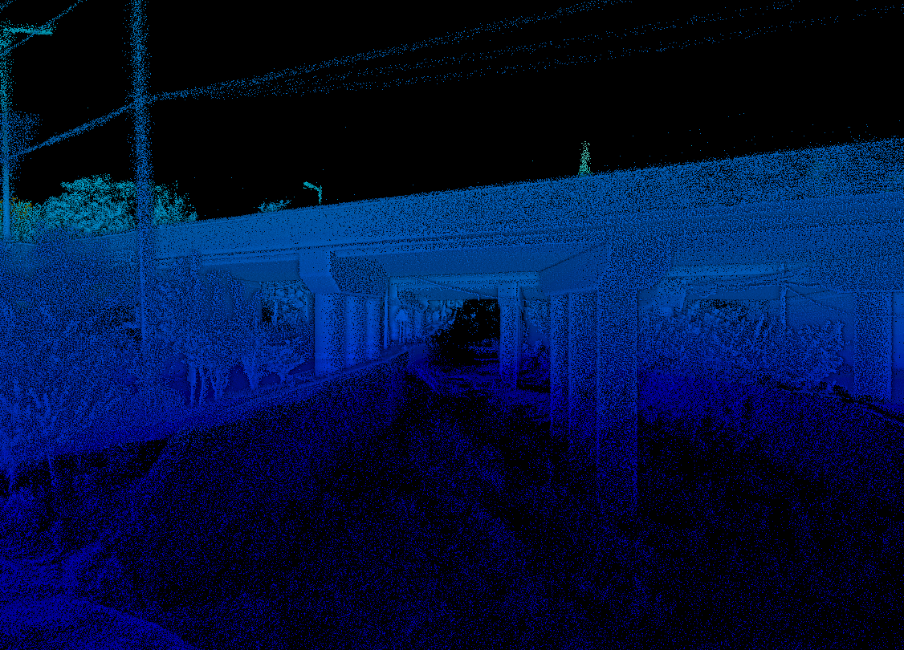
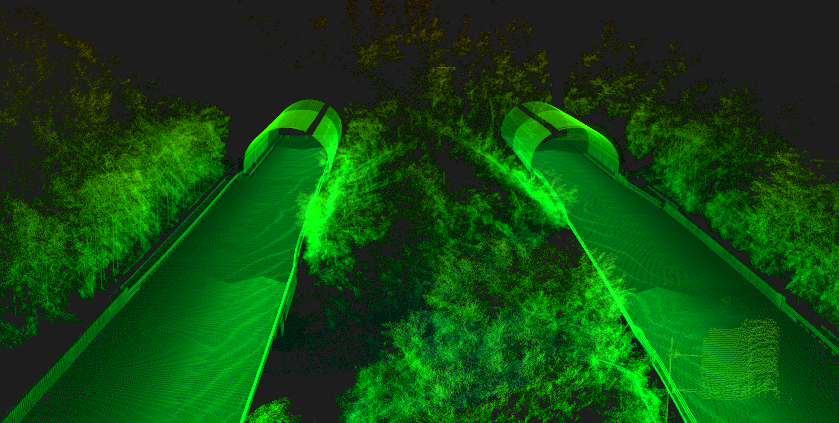
Beginnend mit der Erfassung von Brückenbereichen wurden zwei Scanning-Methoden (fahrzeuggestütztes und Rucksack-Scanning) auf der Grundlage von Feldvalidierungen ausgewählt. Das Scannen mit dem Rucksack erfasst Über- und Unterführungen, während das fahrzeuggestützte Scannen Informationen über Straßen und Tunnel sammelt.
Cygnus Backpack mobile laser scanning system

Mithilfe des mobilen Cygnus-Rucksack-Lasersystems mit RTK erfassen wir den Brückenbereich.
 |
 |
Im Auto montiertes SLAM-Abtastsystem Cygnus
 |
 |
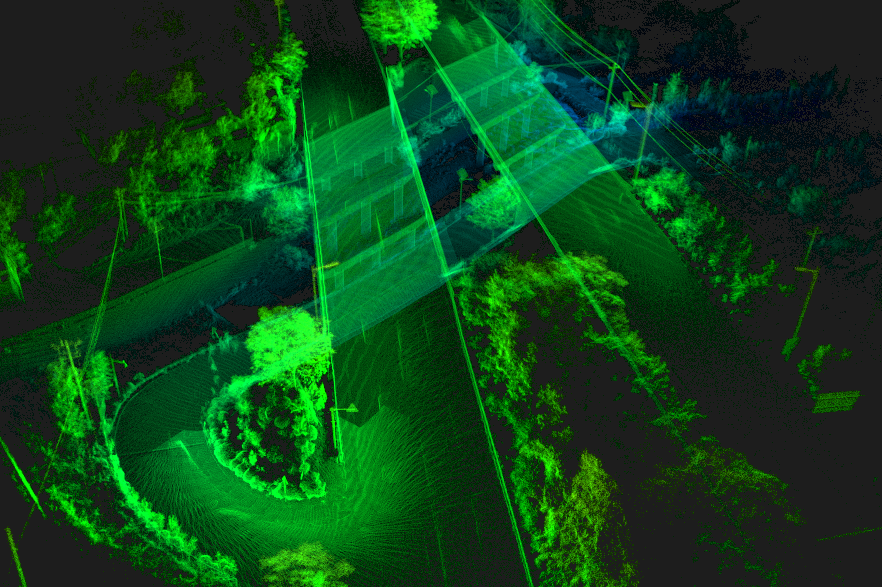
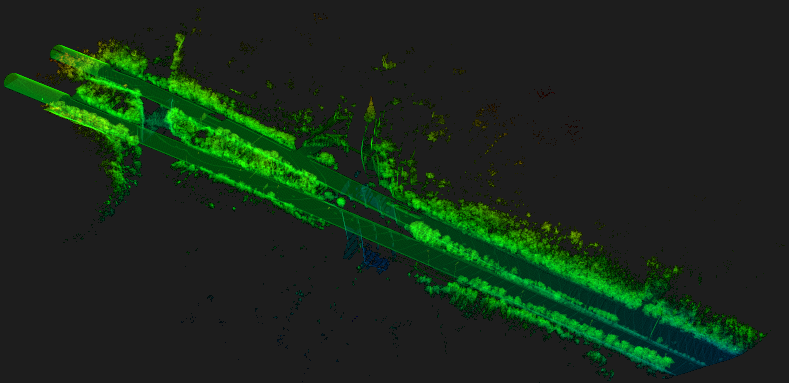
Auf einem Fahrzeug mit RTK montiert, liefern Cygnus SLAM-Scanner bessere Ergebnisse. Bei GNSS-Signalverlusten werden Kontrollpunkte gesetzt, und das Round-Trip-Scanning gewährleistet eine geschlossene Trajektorie für zuverlässige Daten. Die On-Board-Scandaten sind in Abb. 6-a dargestellt, während die Punktwolke am Tunneleingang in Abb. 6-b zu sehen ist.
 |
 |
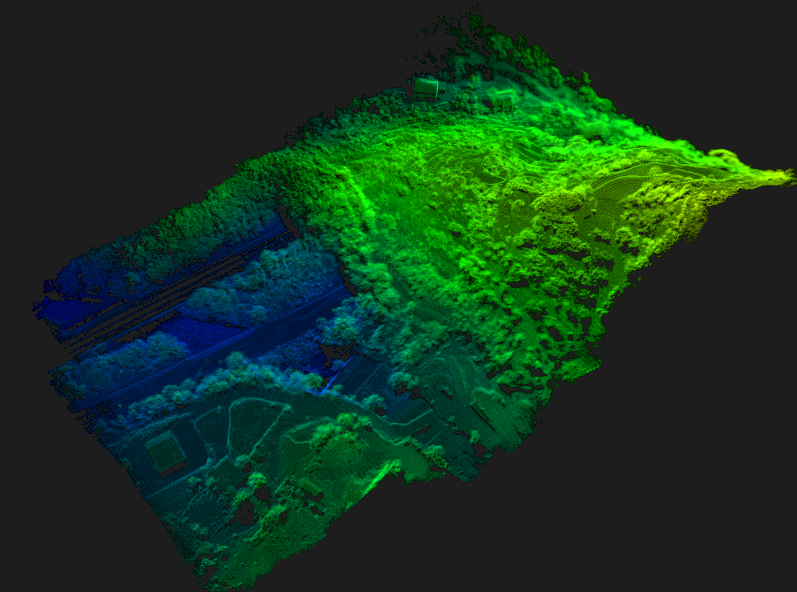
Punktwolkendaten aus mehreren Quellen
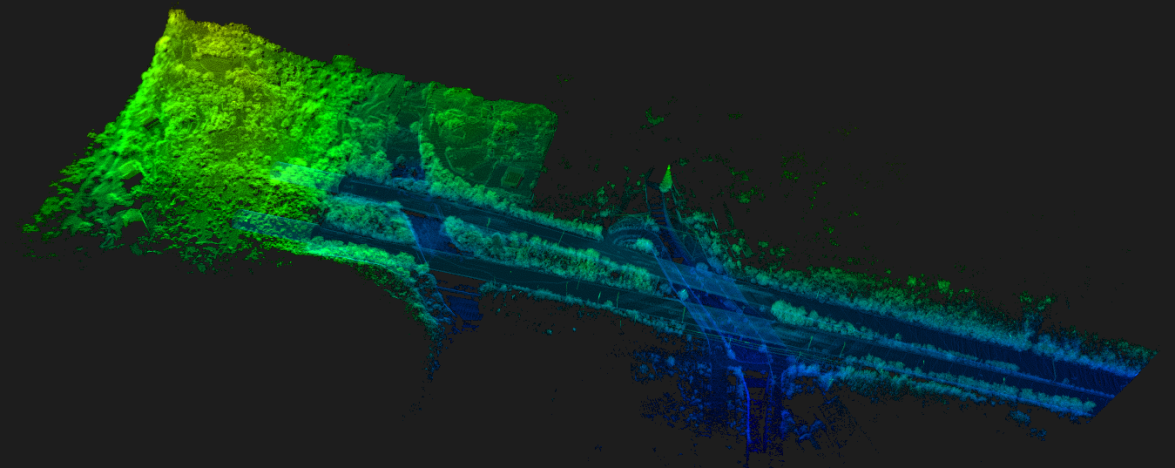
Beide Datentypen werden automatisch mit der SLAM Manager App von Cygnus integriert, was den manuellen Aufwand minimiert und Zeit in der Produktion spart. Die Fusion von Punktwolkendaten harmonisiert Fahrzeug-, Rucksack- und Luftdaten in einem einzigen Koordinatensystem, das im *.las-Format exportiert wird. Dies gewährleistet die Integrität der Brücke und der Umgebung und verhindert Datenlücken. Die vollständigen Daten sind in Abb. 7 dargestellt.
Zusammenfassung
Wir nutzen die Vielseitigkeit von SLAM-Laserscannern (Rucksack, fahrzeugmontiert) für eine verbesserte Datenerfassung. Die Integration von SLAM mit Fernerkundungstechnologien aus der Luft liefert umfassende städtische 3D-Daten.
Kontakt
SatLab Geosolution i Göteborg AB
www.satlab.com.se info@satlab.com.se
Jarnbrotts Prastvag 2,
421 47 Västra Frölunda,
Göteborg, Sweden